
Page 16 - ePB141_創意樂高機器人-使用樂高EV3圖控程式_課本PDF
P. 16
創意樂高機器人
1-2 EV3 圖控程式控制樂高基本車
想要準確控制 EV3 樂高基本車的「前、後、左、右」行走時,就必須先瞭
解如何設定 EV3-G 拼圖程式中「Move Steering(方向盤式移動模組)」或
「Move Tank(坦克式移動模組)」及設定相關的參數值。
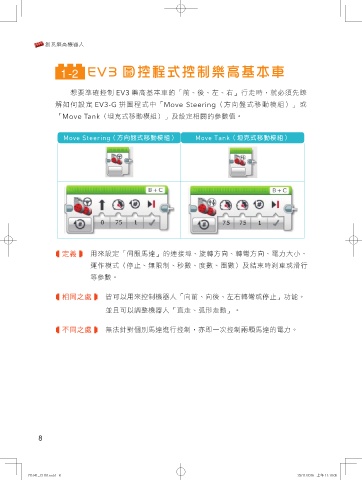
Move Steering(方向盤式移動模組) Move Tank(坦克式移動模組)
定義 用來設定「伺服馬達」的連接埠、旋轉方向、轉彎方向、電力大小、
運作模式(停止、無限制、秒數、度數、圈數)及結束時剎車或滑行
等參數。
相同之處 皆可以用來控制機器人「向前、向後、左右轉彎或停止」功能。
並且可以調整機器人「直走、弧形走動」。
不同之處 無法針對個別馬達進行控制,亦即一次控制兩顆馬達的電力。
8
1# @$) JOEE ɪʹ