
Page 23 - eBC21110_機件原理 上_課本PDF
P. 23
12 機件原理 上
二、機構學中的符號
ዚኪʕٙୌdνڌ 1-1 הͪf
表 1-1 機構學中的符號介紹
圖示 說明
樞軸(pivot),表示彼此活動機件的接合點。
表示固定軸,固定旋轉中心。
表示一根連桿。
表示固定桿、固定面或機架。
表示導路與滑件。
F H 表示 F、K、H 三機件連接在一個樞軸上,三者可圍繞兩個共同樞軸旋轉或擺
K 動。
F
F 為一個連桿,桿上作一樞軸,使連桿 K 能圍繞此一連桿旋轉或滑動。
K
表示多根連桿結為一個剛體,彼此間無相對運動,只相當於一機件。
三、運動鏈 (kinematic chain)
͜Ըෂ༺༶ਗٙዚd၈މஹ (link)dΪෂ༺༶ਗϾၾ̤ɓஹஹટҖϓ
࿁ਅ (pair)dΪࠅෂ༺༶ਗdה˸ࠅϞɓዚո֛ίήɪ၈މήאո֛d݂
ࠅෂ༺༶ਗ௰ˇࠅɧࡈஹfה˸͟ɧ࣬˸ɪʘዚהଡ଼ϓٙஹༀໄd၈މᗡ
(chain)dᗡԱՉ၇ዚගঐщਂ࿁༶ਗd̙ʱމՇ၇j
B
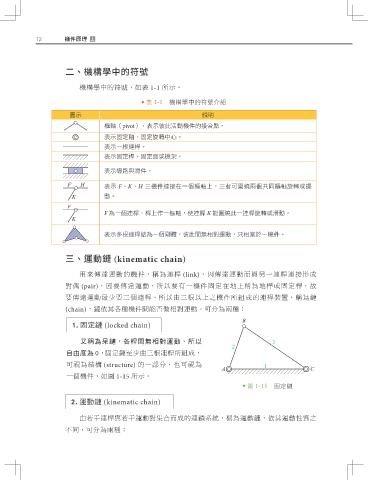
1. 固定鏈 (locked chain)
又稱為呆鏈,各桿間無相對運動,所以 3
2
自由度為 0dո֛ᗡЇˇ͟ɧ࣬ஹהଡ଼ϓd
̙ൖމഐ (structure) ٙɓʱdɰ̙ൖމ 1
A C
ɓࡈዚdνྡ 1-15 הͪf
圖 1-15 固定鏈
2. 運動鏈 (kinematic chain)
߰͟ʍஹၾ߰ʍ༶ਗ࿁ණΥϾϓٙஹᕁӻ୕d၈މ༶ਗᗡdԱՉ༶ਗሯʘ
ʔΝd̙ʱމՇ၇j