
Page 24 - eBC21110_機件原理 上_課本PDF
P. 24
Chapter 1 概述 13
1 拘束運動鏈 (constrained chain) C C
B 3 1
至少由四根連桿所組成,由某一連
B 1
桿之運動可求得該系統中任一連桿之運 4
2
動狀況,因傳達運動為可控制,其自由
度為 1,是為拘束鏈dνྡ 1-16 הͪd 1
A D
ਗ਼ 1 ո֛d 2 ᔷЇݔɓԉܓࣛd
Ϊ 3e 4 ʘڗܓɓ֛d݂ 3e4 Շ 圖 1-16 拘束運動鏈
ʘЗໄɰᎇʘϾ֛ɓছהܸዚd
ѩ᙮Ҽ༶ਗᗡd Їˇცࠅ̬࣬͟ஹ
הଡ଼ϓf
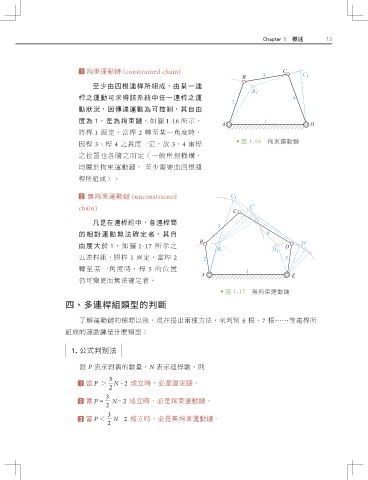
2 無拘束運動鏈 (unconstrained C 1
chain) C C”
凡是在連桿組中,各連桿間 3
的相對運動無法確定者,其自 4
B D”
由 度 大 於 1d ν ྡ 1-17 ה ͪ ʘ D
B 1 D 1
ʞஹଡ଼dਗ਼ 1 ո֛d 2 2 5
ᔷЇݔɓԉܓࣛd 5 ٙЗໄ 1
A E
ʥ̙ᜊһϾೌجᆽ֛٫f
圖 1-17 無拘束運動鏈
四、多連桿組類型的判斷
ə༆༶ਗᗡٙ၇ᗳ˸ܝdତί̈Շ၇˙جdԸкй 6 ࣬e7 ࣬nnഃஹה
ଡ଼ϓٙ༶ਗᗡ݊ʡჿᗳۨj
1. 公式判別法
ண P ڌͪ࿁ਅٙᅰඎdN ڌͪஹᅰdۆ
3
1 當 P 2 N 2 成立時,必是固定鏈。
2
3
2 當 P = N 2 成立時,必是拘束運動鏈。
2
3
3 當 P 1 N 2 成立時,必是無拘束運動鏈。
2